

Interface for classes decorating SmootherCostFunction. More...
#include <CostFunctionDecorator.hpp>
Public Member Functions | |
| CostFunctionDecorator (SmartPointer< SmootherCostFunction > c) | |
| Constructor. More... | |
| virtual arma::mat | giveQmatrix (const InterpolatedCurve &) const |
| returns Q matrix, the quadratic term of optimization cost function More... | |
| virtual arma::mat | giveCvector (const InterpolatedCurve &) const |
| returns C vector, the linear term of optimization cost function More... | |
| virtual double | calculateCost (const InterpolatedCurve &) const |
| calculates value of cost function More... | |
| virtual std::vector< double > | giveSmoothedCurve (const InterpolatedCurve &) const |
| returns curve as vector of doubles More... | |
| virtual void | updateSmoothedCurve (InterpolatedCurve &, const std::vector< double > &) const |
| updates the curve as with the vector of doubles More... | |
| virtual CostFunctionDecorator * | clone () const |
| virtual copy constructor More... | |
| virtual | ~CostFunctionDecorator () |
| destructor More... | |
 Public Member Functions inherited from julian::ir::SmootherCostFunction Public Member Functions inherited from julian::ir::SmootherCostFunction | |
| SmootherCostFunction () | |
| constructor More... | |
| virtual | ~SmootherCostFunction () |
| destructor More... | |
Protected Member Functions | |
| arma::mat | matrixD (int size, int order) const |
| Creates matrix representation of differential operator. More... | |
| arma::mat | matrixX (const InterpolatedCurve &c, int order) const |
| Creates matrix representation of differential operator. More... | |
Private Attributes | |
| SmartPointer< SmootherCostFunction > | cost_function_ |
| Pointer to decorator interface. More... | |
Detailed Description
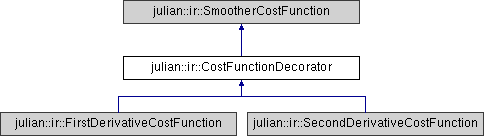
Interface for classes decorating SmootherCostFunction.
CostFunctionDecorator is a interface for all classes decorating the SmootherCostFunction. CostFunctionSmoother's derived classes are used to define the cost function of optimization problems used in ir::InterpolatedCurve construction.
Class also contains methods to calculate the D matrix and X matrix that implements differential operator.
Constructor & Destructor Documentation
|
inlineexplicit |
Constructor.
|
inlinevirtual |
destructor
Member Function Documentation
|
virtual |
calculates value of cost function
Implements julian::ir::SmootherCostFunction.
Reimplemented in julian::ir::FirstDerivativeCostFunction, and julian::ir::SecondDerivativeCostFunction.
|
virtual |
virtual copy constructor
Implements julian::ir::SmootherCostFunction.
Reimplemented in julian::ir::FirstDerivativeCostFunction, and julian::ir::SecondDerivativeCostFunction.
|
virtual |
returns C vector, the linear term of optimization cost function
Implements julian::ir::SmootherCostFunction.
Reimplemented in julian::ir::FirstDerivativeCostFunction, and julian::ir::SecondDerivativeCostFunction.
|
virtual |
returns Q matrix, the quadratic term of optimization cost function
Implements julian::ir::SmootherCostFunction.
Reimplemented in julian::ir::FirstDerivativeCostFunction, and julian::ir::SecondDerivativeCostFunction.
|
virtual |
returns curve as vector of doubles
InterpolatedCurve may be represented by different
Implements julian::ir::SmootherCostFunction.
|
protected |
Creates matrix representation of differential operator.
Numerical derivative of a function f can be approximated using following formula
![\[\frac{df(x)}{dx}|_{x=x_i} \approx \frac{f(x_{i+1}) - f(x_{i})}{x_{i+1}-x_{i}}\]](form_46.png)
If ![$F = [f(x_1), f(x_2), ..., f(x_n)]$](form_47.png) then differencing of function can be presented in matrix form"
then differencing of function can be presented in matrix form"
![\[\frac{dF}{sX} = X^{-1} \times D_{1} \times F\]](form_48.png)
where:
![\[ D_{1} = \begin{bmatrix} 0 & 0 & 0 & \dots & 0 & 0 \\ -1 & 1 & 0 & \dots & 0 & 0 \\ 0 & -1 & 1 & \dots & 0 & 0 \\ 0 & 0 &-1 & \dots & 0 & 0 \\ \hdotsfor{6} \\ 0 & 0 & 0 & \dots & -1 & 1 \end{bmatrix}\]](form_49.png)
![\[ X = \begin{bmatrix} x_{1} - x_{0} & 0 & 0 & \dots & 0 & 0 \\ 0 & x_{2} - x_{1} & 0 & \dots & 0 & 0 \\ 0 & 0 & x_{3} - x_{2} & \dots & 0 & 0 \\ 0 & 0 & 0 & \dots & 0 & 0 \\ \hdotsfor{6} \\ 0 & 0 & 0 &\dots & 0 & x_{n}-x_{n-1} \end{bmatrix}\]](form_50.png)
The second derivative can be calculated by analogy.
This method calculates the D matrix.
- Parameters
-
size Size of D matrix derivative Order of derivative
|
protected |
Creates matrix representation of differential operator.
Numerical derivative of a function f can be approximated using following formula
If then differencing of function can be presented in matrix form:
![\[\frac{dF}{dX} = X^{-1} \times D_{1} \times F\]](form_51.png)
where:
The second derivative can be calculated by analogy.
This method calculates the X matrix.
- Parameters
-
c Curve which derivative we calculates order Order of derivative
|
virtual |
updates the curve as with the vector of doubles
Implements julian::ir::SmootherCostFunction.
Member Data Documentation
|
private |
Pointer to decorator interface.
The documentation for this class was generated from the following files:
- C:/Unix/home/OEM/jULIAN/src/marketData/interestRateCurves/estimators/costFunctions/CostFunctionDecorator.hpp
- C:/Unix/home/OEM/jULIAN/src/marketData/interestRateCurves/estimators/costFunctions/CostFunctionDecorator.cpp
